|
|
| (40 intermediate revisions by 2 users not shown) |
| Line 1: |
Line 1: |
| = Chico Instructions =
| | This article describes '''Chico''' (code-name iCubLisboa01, [http://wiki.icub.org/wiki/ICub_versions iCub version] 1.2.1), the whole-body humanoid robot of [[Vislab]]. |
|
| |
|
| == Preliminaries ==
| | ''For demo instructions, refer to [[iCub instructions]].'' |
|
| |
|
| ICub has a PC104 with a flash disk configured to 10.10.1.50
| | ''Note: see [[Chico/Archive]] about historical information.'' |
| It mounts the repositories that are on the laptop 10.10.1.51 (icub icub)
| |
| There is a support machine called chico2 (10.10.1.52) for running the yarp server, launching scripts and visualization.
| |
|
| |
|
| | TODO: to be completed and updated, in particular the firmware information below is obsolete. |
|
| |
|
| The laptop has 2 repositories
| | = Preliminaries = |
| /export/code_64 for the laptop (compiled for 32bit)
| |
| /export/code_pc104 for the robot (compiled for 64bit)
| |
| They are anonymous, so changes are not commitable (DO NOT CHANGE)
| |
|
| |
|
| Everything running with /icub namespace
| | * the iCub has a [[pc104|PC104]] with a flash disk configured with IP 10.10.1.50 |
| | * it mounts the repositories that are on the '''icub-laptop''' machine (10.10.1.53) |
|
| |
|
| == Running a demo == | | = Maintenance = |
|
| |
|
| 1 - Turn on chico2
| | == Arm fine calibration == |
|
| |
| set the namespace to /icub
| |
| "yarp namespace /icub"
| |
|
| |
|
| run the yarp server (note that "yarpserver" is just one word. This way Cluster Manager can kill it)
| | Refer to http://wiki.icub.org/wiki/ArmFineCalibration |
| "yarpserver"
| |
|
| |
|
| run the yarp run server
| | Basically, with yarpmotorgui set the arm joints to [-90 15 15 90]. Visually compare the arm angles with the reference picture. |
| "yarp run --server /chico2"
| |
|
| |
|
| |
|
| 2 - Turn on the laptop
| | == Hardware == |
|
| |
|
| '''not needed'''
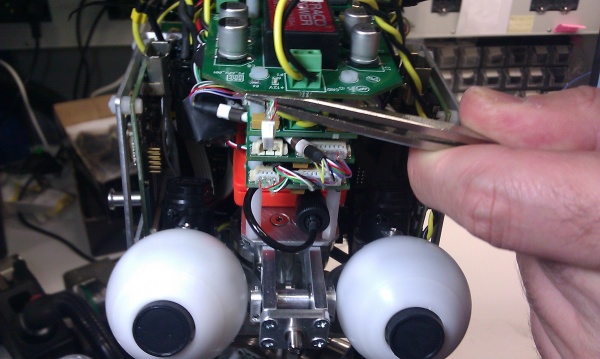
| | CAN 0, board 14 is just a spare board that lies in Chico's head (inherited from the design of the previous version of the head), not being used at the moment. It can slow down the CAN communication because the board is present and responding. If needed, we can disconnect it as shown: |
| set the namespace to /icub
| |
| "yarp namespace /icub"
| |
|
| |
|
| '''not needed'''
| | [[Image:ICub_headV2_CAN0_board14_disconnected.jpg|600px|How to disconnect board 14.]] |
| make sure the name server is visible
| |
| "yarp where" should detect the name server (10.10.1.???)
| |
|
| |
|
| '''not needed'''
| | When a joint/encoder breaks, refer to [[Chico joint calibration]]. |
| run the yarp run server
| |
| "yarp run --server /icubsrv"
| |
|
| |
| 2- Turn on the robot (it will mount the repository that is stored on the laptop)
| |
|
| |
| switch on the power supply units (grey boxes under the table)
| |
|
| |
|
| switch on the cpu and motors of the iCub (green switches behind the iCub)
| | == Firmware == |
|
| |
|
| '''not needed'''
| | Keep same Release and Version numbers; only increment Build number. Refer to [http://wiki.icub.org/wiki/Firmware this page] from the official iCub manual, using the following script: |
| log in to pc104
| | ./updateRobot.sh updateLisboa01.txt |
| ssh icub@10.10.1.50
| |
| | |
| '''not needed'''
| |
| set the namespace to /icub
| |
| "yarp namespace /icub"
| |
| | |
| '''not needed'''
| |
| make sure the name server is visible
| |
| "yarp where" should detect the name server (10.10.1.???)
| |
| | |
| '''not needed'''
| |
| run the yarp run server
| |
| "yarp run --server /pc104"
| |
| | |
| '''make sure''' "./yarp run --server /pc104" is running on pc104 and that "/pc104" is seen by the yarp server (by doing a "yarp name list").
| |
| if is not, "killall yarp" on pc104 and "./yarp run --server /pc104"
| |
| | |
| | |
| 3- (Skip this for now) Start yarp run
| |
| | |
| cd /iCub/app/default/scripts/
| |
| ./icub-cluster.sh run
| |
| ./icub-cluster.sh check
| |
| there must be 3 ok messages
| |
| | |
| if some problem
| |
| ./icub-cluster.sh check
| |
| ./icub-cluster.sh stop
| |
| killall yarp
| |
| | |
| killall yarp on pc104
| |
| | |
| ./icub-cluster.sh run
| |
| | |
| | |
| 4- turn on cameras
| |
| | |
| On chico2 do:
| |
| | |
| cd $ICUB_DIR/app/default/scripts
| |
| ./cameras start
| |
| | |
| sometimes connections must be established manually
| |
| "yarp connect /icub/cam/right /icub/view/right"
| |
| "yarp connect /icub/cam/left /icub/view/left"
| |
| | |
| To turn off the cameras do:
| |
| ./cameras stop
| |
| | |
| To change the size of the images edit file:
| |
| $ICUB_DIR/app/default/scripts/config.sh
| |
| | |
| | |
| | |
| | |
| 5- Run iCubInterface (hardware except cameras)
| |
| | |
| UNLOCK THE RED BUTTON SWITCH
| |
| open a pc104 console
| |
| iCubInterface --config $ICUB_ROOT/app/iCubLisboa01/conf/icubSafe.ini
| |
| wait for all boards to answer ( < 1 min )
| |
| control^C to cancel
| |
| | |
| | |
| 6- Run YOGA demo
| |
| | |
| on pc104 or chico2:
| |
| iCubDemoY3 --config /app/demoy3/fullBody.txt
| |
| | |
| | |
| 7- Start facial expressions driver
| |
| | |
| Open a pc104 console:
| |
| cd $ICUB_DIR/app/faceExpressions/scripts
| |
| ./emotions.sh $ICUB_DIR/app/iCubLisboa01/conf
| |
| | |
| 8 - Start facial expresions demo
| |
| | |
| In any machine:
| |
| $ICUB_DIR/app/faceExpressions/scripts/cycle.sh
| |
| | |
| or
| |
| | |
| yarp rpc /icub/face/emotions/in
| |
| set all hap // full face happy
| |
| set all sad // full face sad
| |
| set all ang // full face angry
| |
| set all neu // full face neutral
| |
| set mou sur // mouth surprised
| |
| set eli evi // eyelids evil
| |
| set leb shy // left eyebrow shy
| |
| set reb cun // right eyebrow cunning
| |
| set all ta1 // mouth talking position 1 (mouth closed)
| |
| set all ta2 // mouth talking position 2 (mouth open)
| |
| | |
| 9 - Run the ball following demo
| |
|
| |
| [[ballFollowingDemo]]
| |
|
| |
| 10 - Run the SIFT Object detection and tracking demo
| |
| | |
| In any machine:
| |
| $ICUB_DIR/app/iCubLisboa01/scripts/controlGazeManual.sh
| |
| $ICUB_DIR/app/iCubLisboa01/scripts/attentionObjects/noEgoSetup/CalibBothStart.sh
| |
| | |
| In any other machine (requires lots of processing power):
| |
| $ICUB_DIR/app/iCubLisboa01/scripts/attentionObjects/noEgoSetup/startSiftObjectRepresentation.sh
| |
| | |
| To change configuration:
| |
| $ICUB_DIR/app/iCubLisboa01/conf/icubEyes.ini
| |
| | |
| == Useful information ==
| |
| | |
| {| border="1"
| |
| |+ IP address list
| |
| ! name !! IP address
| |
| |-
| |
| |pc104 || 10.10.1.50
| |
| |-
| |
| |icubsrv || 10.10.1.51
| |
| |-
| |
| |chico2 || 10.10.1.52
| |
| |-
| |
| |cortex1 || 10.10.1.1
| |
| |-
| |
| |cortex2 || 10.10.1.2
| |
| |-
| |
| |cortex3 || 10.10.1.3
| |
| |-
| |
| |cortex4 || 10.10.1.4
| |
| |-
| |
| |cortex5 || 10.10.1.5
| |
| |-
| |
| |}
| |
| | |
| == ToDo for this page ==
| |
| | |
| ToDo: add information to the wiki on how to quit the demos/turn the iCub off.
| |
|
| |
|
| [[Category:Robots]] | | [[Category:Robots]] |
| [[Category:Vislab]] | | [[Category:Vislab]] |
This article describes Chico (code-name iCubLisboa01, iCub version 1.2.1), the whole-body humanoid robot of Vislab.
For demo instructions, refer to iCub instructions.
Note: see Chico/Archive about historical information.
TODO: to be completed and updated, in particular the firmware information below is obsolete.
Preliminaries
- the iCub has a PC104 with a flash disk configured with IP 10.10.1.50
- it mounts the repositories that are on the icub-laptop machine (10.10.1.53)
Maintenance
Arm fine calibration
Refer to http://wiki.icub.org/wiki/ArmFineCalibration
Basically, with yarpmotorgui set the arm joints to [-90 15 15 90]. Visually compare the arm angles with the reference picture.
Hardware
CAN 0, board 14 is just a spare board that lies in Chico's head (inherited from the design of the previous version of the head), not being used at the moment. It can slow down the CAN communication because the board is present and responding. If needed, we can disconnect it as shown:
When a joint/encoder breaks, refer to Chico joint calibration.
Firmware
Keep same Release and Version numbers; only increment Build number. Refer to this page from the official iCub manual, using the following script:
./updateRobot.sh updateLisboa01.txt
